“MAT” (Multi-Agent Transportation system with distributed-control concept)
動物である人類にとって「移動」は非常に重要な意味を持っています.例えば栄養補給のためには,食物あるいはその材料を居所まで「運ぶ」または自ら食事が摂れる環境へ「行く」という動作が不可欠です.現代社会における情報・通信技術の重要性は論を俟ちませんが,それらと並行して実世界の中で「物体を移動すること」あるいは「自分自身が移動すること」は,人が為す根源的な事象であると考えられます.

人間が行なう「移動」を伴うタスクは,農林水産業に必須である重量物運搬,森林・砂漠・雪氷原等の不整地踏破,深海・宇宙等の極限環境における調査・探査など枚挙に遑がありません.そしてこれらのタスク毎に,さらにはタスク遂行中の場面毎に,安定性・運動量・踏破性・精度といった多種多様な移動性能が必要とされます.このような様々に変化する要求へ柔軟に対応できる移動システムを構築すべく,本研究室では「自律分散系」に着目して,その移動体への応用について考察しています.

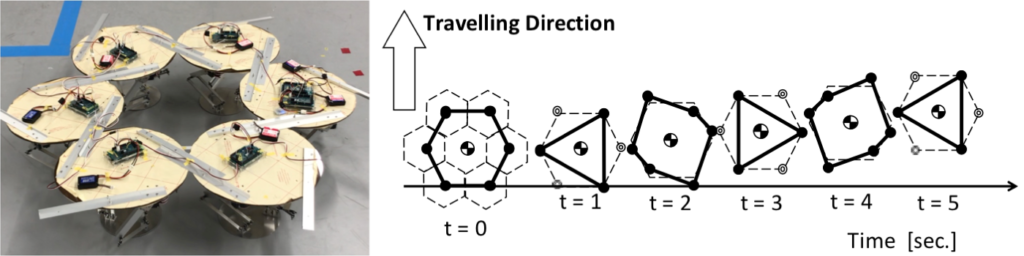
下図は,不整地移動用システム「自律分散型移動体(MAT)」の概念図および試作機です.自律分散系では,同一の(場合によっては複数種の)「ユニット」が多数結合することで一つのシステムを構成します.試作したシステム(MAT)では,必要最小の制御系および移動機能を均質に有するユニットを用意し,それぞれが隣接ユニットとの相互通信網を通じて判断・行動することで,システム全体としての移動機能が発現します.またMATでは,ユニット相互の機械的な結合関係,すなわちシステム形態が可変であることも大きな特徴であり,その利点を活かして,搭載物や環境変化への「適応性」および外的要因へ対応できる「頑健性」を有する移動系へ発展させることを目指しています.
これまでに以下のような研究を進めてきました:
通信プロトコルを含めたシステム構成を創出
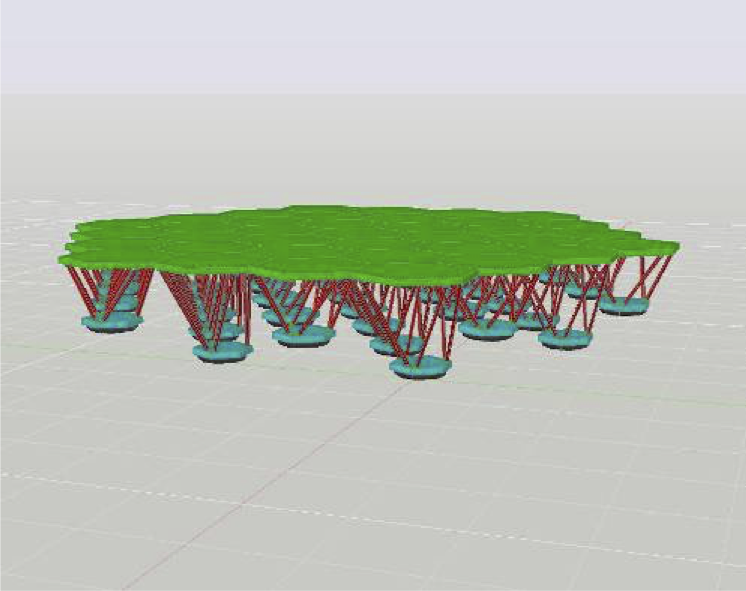
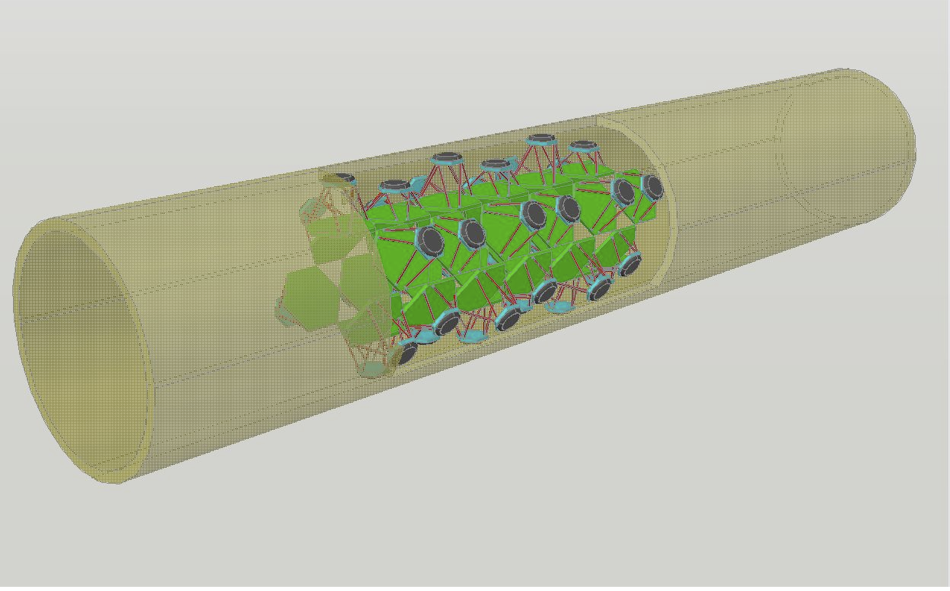
その整合性をシミュレーションで確認
試作機を用いた移動実験により全体構想を実証
移動機能に関する自律分散系において顕著な知見を蓄積
これらを含む研究成果については Publications をご覧ください.